[机器学习][数学基础]线性代数概括
文章目录
- 1向量
- 1.1向量的运算
- 1.2正交向量
- 2矩阵
- 2.1矩阵的直观表示
- 2.2矩阵与向量
- 2.3矩阵相等
- 2.4方阵
- 2.5负矩阵、上三角矩阵、下三角矩阵
- 2.6对角矩阵
- 2.7单位矩阵
- 2.8零矩阵
- 2.9矩阵的运算
- 2.9.1矩阵的加减法
- 2.9.2矩阵与数的乘法
- 2.9.3矩阵与向量的乘法
- 2.9.4矩阵与矩阵的乘法
- 2.9.4.1例子1
- 2.10注意
- 2.11矩阵的转置
- 2.11.1例子1
- 2.11.2转置的运算性质
- 2.12方阵行列式
- 2.13代数余子式
- 2.13.1例子1
- 2.14伴随矩阵
- 2.15方阵的逆
- 2.15.1例子1
- 3矩阵的初等变换
- 3.1等价关系的性质
- 3.2等价标准形定理
- 3.2.1例子1
- 3.2.2例子2
- 3.3矩阵的秩
- 3.3.1例子
- 3.4向量组
- 3.4.1向量组等价
- 3.4.2系数矩阵
- 3.4.3正交矩阵
- 3.4.4对称矩阵
- 4线性方程组
- 4.1求解线性方程组步骤
- 4.1.2例子1
- 4.1.3例子2
- 4.2两大基本定理
- 4.3齐次方程组解的结构定理
- 4.3.1例子1
- 5特征值和特征向量
- 5.1特征值和特征向量求解
- 6可对角化矩阵
- 6.1例子1
- 7正定矩阵
- 8奇异矩阵
- 9QR分解
- 10SVD
线性(linear)指量(变量)与量(变量)之间按比例、成直线关系,在数 学上可以理解为一阶导数为常数的函数;而非线性(non-linear)是 指不成比例、没有直线关系,一阶导数不是常数的函数。
线性代数中的基本量指的是向量,基本关系是严格的线性关系;也
就是可以简单的将线性代数理解为向量与向量之间的线性关系的映
射。
1向量
- 向量:是指具有n个互相独立的性质(维度)的对象的表示,向量常
使用字母+箭头的形式进行表示,也可以使用几何坐标来表示向量,
比如 a ⃗ = O P → = x i + y j + z k \vec a=\overrightarrow{OP}=xi+yj+zk a=OP=xi+yj+zk ,可以用坐标 ( i , j , k ) (i,j,k) (i,j,k)表示向量 a a a - 向量的模:向量的大小,也就是向量的长度,向量坐标到原点的距离,常记作|a|
- 单位向量:长度为一个单位(即模为1)的向量就叫做单位向量
1.1向量的运算
设两向量为: a ⃗ = ( x 1 , y 1 ) , b ⃗ = ( x 2 , y 2 ) \vec a=(x_1,y_1),\vec b=(x_2,y_2) a=(x1,y1),b=(x2,y2)
- 向量的加法/减法满足平行四边形法则和三角形法则
a ⃗ + b ⃗ = ( x 1 + x 2 , y 1 + y 2 ) \vec a+\vec b=(x_1+x_2,y_1+y_2) a+b=(x1+x2,y1+y2)
a ⃗ − b ⃗ = ( x 1 − x 2 , y 1 − y 2 ) \vec a-\vec b=(x_1-x_2,y_1-y_2) a−b=(x1−x2,y1−y2) - 数乘:实数λ和向量a的乘积还是一个向量,记作λa,且|λa|= |λ| |a|;数乘 的几何意义是将向量a进行伸长或者压缩操作
λ a ⃗ = ( λ x 1 , λ y 1 ) \lambda \vec a=(\lambda x_1,\lambda y_1) λa=(λx1,λy1)
设两向量为: a ⃗ ( x 1 , y 1 ) , b ⃗ = ( x 2 , y 2 ) \vec a(x_1,y_1),\vec b=(x_2,y_2) a(x1,y1),b=(x2,y2),并且a和b之间的夹角为 θ \theta θ
- 数量积:两个向量的数量积(内积、点积)是一个数量/实数,记作 a ⃗ ∗ b ⃗ \vec a* \vec b a∗b
a ⃗ ∗ b ⃗ = ∣ a ⃗ ∣ ∗ ∣ b ⃗ ∣ ∗ cos θ \vec a * \vec b=|\vec a|*|\vec b|*\cos\theta a∗b=∣a∣∗∣b∣∗cosθ - 向量积:两个向量的向量积(外积、叉积)是一个向量,记作 a ⃗ ∗ b ⃗ \vec a *\vec b a∗b;向量积即两个不共线非零向量所在平面的一组法向量
∣ a ⃗ ∗ b ⃗ ∣ = ∣ a ⃗ ∣ ∗ ∣ b ⃗ ∣ ∗ sin θ |\vec a*\vec b|=|\vec a|*|\vec b|*\sin\theta ∣a∗b∣=∣a∣∗∣b∣∗sinθ
1.2正交向量
正交向量:如果两个向量的点积为零,那么称这两个向量互为正交向量;在几何意义上来讲,正交向量在二维/三维空间上其实就是两 个向量垂直。
如果两个或者多个向量,它们的点积均为0,那么它们互相称为正交向量。
2矩阵
矩阵:即描述线性代数中线性关系的参数,即矩阵是一个线性变换, 可以将一些向量转换为另一些向量。
初等代数中, y = a x y=ax y=ax表示的是 x x x到 y y y的一种映射关系,其中 a a a是描述这中关系的参数。
线性代数中, Y = A X Y=AX Y=AX表示的是向量 X X X和 Y Y Y的一种映射关系,其中 A A A是描述这种关系的参数。
2.1矩阵的直观表示
数域 F F F中 m ∗ n m*n m∗n个数排成 m m m行 n n n列,并括以圆括弧(或方括弧)的数表示 成为数域 F F F上的矩阵,通常用大写字母记作 A A A或者 A m ∗ n A_{m*n} Am∗n,有时也记作 A = ( a i j ) m ∗ n ( i = 1 , 2… , m ; j = 1 , 2 , . . . n ) A=(a_{ij})_{m*n}(i=1,2…,m;j=1,2,…n) A=(aij)m∗n(i=1,2…,m;j=1,2,…n),其中 a i j a_{ij} aij表示矩阵 A A A的第 i i i行的第 j j j列元素,当 F F F为实数域 R R R时, A A A叫做实矩阵,当 F F F为复数域 C C C时, A A A叫做复矩阵。
[ a 11 a 12 ⋯ a 1 n a 21 a 22 ⋯ a 2 n ⋯ ⋯ ⋯ ⋯ a m 1 a m 2 ⋯ a m n ] \left[ \begin{matrix} a_{11} & a_{12} &\cdots & a_{1n} \\ a_{21} & a_{22} &\cdots & a_{2n} \\ \cdots & \cdots &\cdots & \cdots \\ a_{m1} & a_{m2} &\cdots & a_{mn} \\ \end{matrix} \right] ⎣⎢⎢⎡a11a21⋯am1a12a22⋯am2⋯⋯⋯⋯a1na2n⋯amn⎦⎥⎥⎤
2.2矩阵与向量
当m=1或者n=1的时候,称A为行向量或者列向量
A = [ a 11 a 12 ⋯ a 1 n ] A = \left[ \begin{matrix} a_{11} & a_{12} & \cdots & a_{1n} \end{matrix} \right] A=[a11a12⋯a1n]
A = [ a 11 a 21 ⋯ a m 1 ] A= \left[ \begin{matrix} a_{11}\\ a_{21}\\ \cdots\\ a_{m1} \end{matrix} \right] A=⎣⎢⎢⎡a11a21⋯am1⎦⎥⎥⎤
2.3矩阵相等
- 对于两个矩阵A和B,当他们行数相等,列数相同,并且对应位置上的元素都相等时,称矩阵A与B相等,记做A=B
- 即 a i j = b i j a_{ij}=b_{ij} aij=bij,对所有i=1,2,…,m; j=1,2,…,n都成立
- 若两个矩阵行数列数分别相等,则为同型矩阵
2.4方阵
如果矩阵A中m等n,那么称矩阵A为n阶矩阵(或n阶方阵)。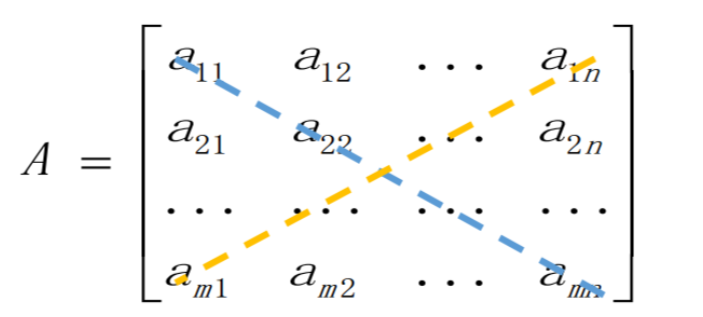
蓝色是主对角线,黄色是次对角线
2.5负矩阵、上三角矩阵、下三角矩阵
对于矩阵A(所有元素m*n),各个元素取相反数得到的矩阵称为A的负矩阵,记为-A
对于矩阵A
A = [ 1 2 5 6 ] A= \left[ \begin{matrix} 1 & 2\\ 5 & 6 \end{matrix} \right] A=[1526]
的负矩阵为
A = [ − 1 − 2 − 5 − 6 ] A= \left[ \begin{matrix} -1 & -2\\ -5 & -6 \end{matrix} \right] A=[−1−5−2−6]
下、上三角矩阵: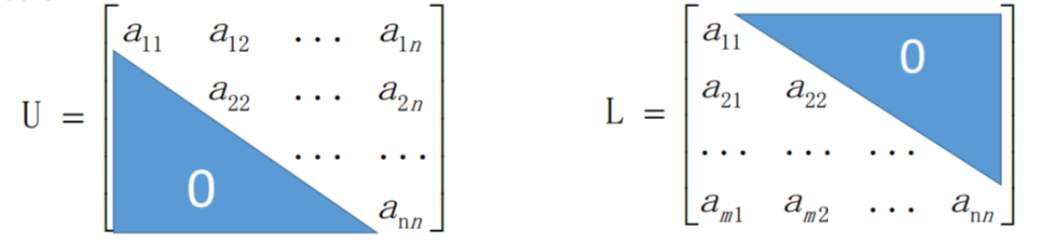
2.6对角矩阵
既是上三角矩阵又是下三角矩阵的矩阵称为对角方阵或对角矩阵
记为:
D = d i a g [ a 11 a 12 ⋯ a n n ] D =diag \left[ \begin{matrix} a_{11} & a_{12} &\cdots &a_{nn} \end{matrix} \right] D=diag[a11a12⋯ann]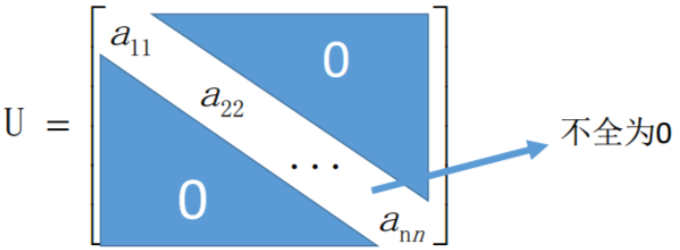
对角元的和 Σ i = 1 n = a i i \Sigma_{i=1}^n=a_{ii} Σi=1n=aii称为方阵A的迹,记为trA
2.7单位矩阵
单位矩阵:n阶方阵中除了主对角线上的元素外,其他元素均为0,主对角线元素均为1,那么此时的n阶方阵叫做n阶单位矩阵。单位矩阵通常用E或I表示
D = [ 1 0 ⋯ 0 0 1 ⋯ 0 ⋯ ⋯ ⋯ ⋯ 0 0 ⋯ 1 ] D = \left[ \begin{matrix} 1 & 0 &\cdots & 0\\ 0 & 1 &\cdots & 0\\ \cdots & \cdots & \cdots &\cdots\\ 0 & 0 & \cdots & 1 \end{matrix} \right] D=⎣⎢⎢⎡10⋯001⋯0⋯⋯⋯⋯00⋯1⎦⎥⎥⎤
2.8零矩阵
如果矩阵A中的所有元素(m*n个)均为0,那么此时矩阵A叫做零矩 阵,可以记作0。
D = [ 0 0 ⋯ 0 0 0 ⋯ 0 ⋯ ⋯ ⋯ ⋯ 0 0 ⋯ 0 ] D = \left[ \begin{matrix} 0 & 0 &\cdots & 0\\ 0 & 0 &\cdots & 0\\ \cdots & \cdots & \cdots &\cdots\\ 0 & 0 & \cdots & 0 \end{matrix} \right] D=⎣⎢⎢⎡00⋯000⋯0⋯⋯⋯⋯00⋯0⎦⎥⎥⎤
2.9矩阵的运算
2.9.1矩阵的加减法
矩阵的加法与减法要求进行操作的两个矩阵A和B具有相同的阶, 假设A为mn阶矩阵,B为mn阶矩阵,那么 C = A ± B C=A \pm B C=A±B也是m*n阶的矩阵,并且矩阵C的元素满足 c i j = a i j + b i j c_{ij}=a_{ij}+b_{ij} cij=aij+bij
A = [ a 11 a 12 ⋯ a 1 n a 21 a 22 ⋯ a 2 n ⋯ ⋯ ⋯ ⋯ a m 1 a m 2 ⋯ a m n ] B = [ b 11 b 12 ⋯ b 1 n b 21 b 22 ⋯ b 2 n ⋯ ⋯ ⋯ ⋯ b m 1 b m 2 ⋯ b m n ] A = \left[ \begin{matrix} a_{11} & a_{12} &\cdots & a_{1n} \\ a_{21} & a_{22} &\cdots & a_{2n} \\ \cdots & \cdots &\cdots & \cdots \\ a_{m1} & a_{m2} &\cdots & a_{mn} \\ \end{matrix} \right] B = \left[ \begin{matrix} b_{11} & b_{12} &\cdots & b_{1n} \\ b_{21} & b_{22} &\cdots & b_{2n} \\ \cdots & \cdots &\cdots & \cdots \\ b_{m1} & b_{m2} &\cdots & b_{mn} \\ \end{matrix} \right] A=⎣⎢⎢⎡a11a21⋯am1a12a22⋯am2⋯⋯⋯⋯a1na2n⋯amn⎦⎥⎥⎤B=⎣⎢⎢⎡b11b21⋯bm1b12b22⋯bm2⋯⋯⋯⋯b1nb2n⋯bmn⎦⎥⎥⎤
C = A ± B = [ a 11 ± b 11 a 12 ± b 12 ⋯ a 1 n ± b 1 n a 21 ± b 21 a 22 ± b 22 ⋯ a 2 n ± b 2 n ⋯ ⋯ ⋯ ⋯ a m 1 ± b m 1 a m 2 ± b m 2 ⋯ a m n ± b m n ] C = A \pm B = \left[ \begin{matrix} a_{11}\pm b_{11} & a_{12}\pm b_{12} &\cdots & a_{1n}\pm b_{1n} \\ a_{21}\pm b_{21} & a_{22}\pm b_{22} &\cdots & a_{2n}\pm b_{2n} \\ \cdots & \cdots &\cdots & \cdots \\ a_{m1}\pm b_{m1} & a_{m2}\pm b_{m2} &\cdots &a_{mn}\pm b_{mn} \\ \end{matrix} \right] C=A±B=⎣⎢⎢⎡a11±b11a21±b21⋯am1±bm1a12±b12a22±b22⋯am2±bm2⋯⋯⋯⋯a1n±b1na2n±b2n⋯amn±bmn⎦⎥⎥⎤
2.9.2矩阵与数的乘法
数乘:将数λ与矩阵A相乘,就是将数λ与矩阵A中的每一个元素相乘,记作λA;结果C=λA,并且C中的元素满足: c i j = λ a i j c_{ij}=\lambda a_{ij} cij=λaij
A = [ a 11 a 12 ⋯ a 1 n a 21 a 22 ⋯ a 2 n ⋯ ⋯ ⋯ ⋯ a m 1 a m 2 ⋯ a m n ] A = \left[ \begin{matrix} a_{11} & a_{12} &\cdots & a_{1n} \\ a_{21} & a_{22} &\cdots & a_{2n} \\ \cdots & \cdots &\cdots & \cdots \\ a_{m1} & a_{m2} &\cdots & a_{mn} \\ \end{matrix} \right] \\ A=⎣⎢⎢⎡a11a21⋯am1a12a22⋯am2⋯⋯⋯⋯a1na2n⋯amn⎦⎥⎥⎤
λ A = [ λ a 11 λ a 12 ⋯ λ a 1 n λ a 21 λ a 22 ⋯ λ a 2 n ⋯ ⋯ ⋯ ⋯ λ a m 1 λ a m 2 ⋯ λ a m n ] \lambda A= \left[ \begin{matrix} \lambda a_{11} & \lambda a_{12} &\cdots & \lambda a_{1n} \\ \lambda a_{21} & \lambda a_{22} &\cdots & \lambda a_{2n} \\ \cdots & \cdots &\cdots & \cdots \\ \lambda a_{m1} & \lambda a_{m2} &\cdots & \lambda a_{mn} \\ \end{matrix} \right] λA=⎣⎢⎢⎡λa11λa21⋯λam1λa12λa22⋯λam2⋯⋯⋯⋯λa1nλa2n⋯λamn⎦⎥⎥⎤
2.9.3矩阵与向量的乘法
假设A为mn阶矩阵,x为n1的列向量,则Ax为m*1的列向量,记作: y ⃗ = A x ⃗ \vec y = A \vec x y=Ax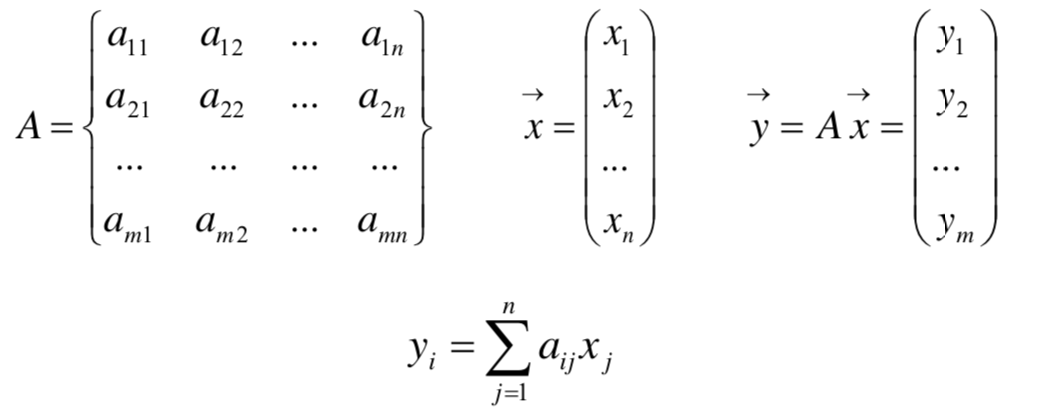
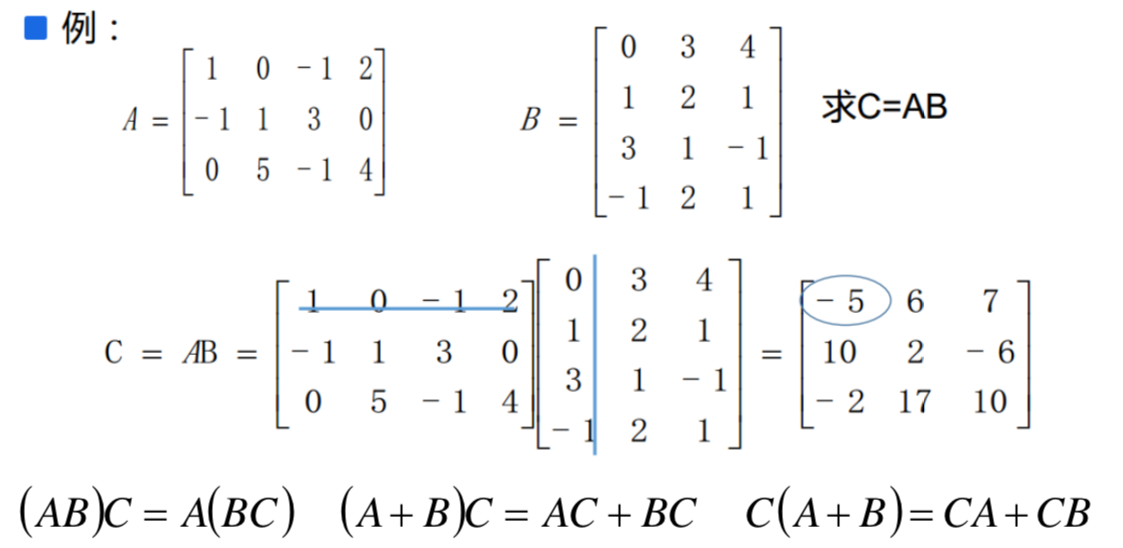
2.9.4矩阵与矩阵的乘法
矩阵的乘法仅当第一个矩阵A的列数和第二个矩阵B的行数相等时 才能够定义,假设A为ms阶矩阵,B为sn阶矩阵,那么C=AB是mn阶矩阵,并且矩阵C中的元素满足: c i j = Σ k = 1 s a i k b k j c_{ij}=\Sigma_{k=1}^s a_{ik}b_{kj} cij=Σk=1saikbkj
2.9.4.1例子1
2.10注意
(1)只有当两个矩阵是同型矩阵时,才能进行加法运算.
(2)只有当第一个矩阵的列数等于第二个矩阵的行数时,两个矩阵才能相乘,且矩阵相乘不满足交换律.
(3)矩阵的数乘运算与行列式的数乘运算不同. (4)矩阵乘法中存在化零因子,而实数乘法中不存在化零因子。
(5)在实数运算系统中, a x = 0 ( a ≠ 0 ) ax=0(a\neq 0) ax=0(a=0)方程有唯一解,等价的有消去律,矩阵乘法中没有,消去律不成立.
2.11矩阵的转置
矩阵的转置:把矩阵A的行和列互相交换所产生的矩阵称为A的转置矩阵,这一过程叫做矩阵的转置。 使用 A T A^T AT 表示A的转置
A = [ a 11 a 12 ⋯ a 1 n a 21 a 22 ⋯ a 2 n ⋯ ⋯ ⋯ ⋯ a m 1 a m 2 ⋯ a m n ] A = \left[ \begin{matrix} a_{11} & a_{12} &\cdots & a_{1n} \\ a_{21} & a_{22} &\cdots & a_{2n} \\ \cdots & \cdots &\cdots & \cdots \\ a_{m1} & a_{m2} &\cdots & a_{mn} \\ \end{matrix} \right] \\ A=⎣⎢⎢⎡a11a21⋯am1a12a22⋯am2⋯⋯⋯⋯a1na2n⋯amn⎦⎥⎥⎤
A T = [ a 11 a 21 ⋯ a m 1 a 12 a 22 ⋯ a m 2 ⋯ ⋯ ⋯ ⋯ a 1 n a 2 n ⋯ a m n ] A^T = \left[ \begin{matrix} a_{11} & a_{21} &\cdots & a_{m1} \\ a_{12} & a_{22} &\cdots & a_{m2} \\ \cdots & \cdots &\cdots & \cdots \\ a_{1n} & a_{2n} &\cdots & a_{mn} \\ \end{matrix} \right] \\ AT=⎣⎢⎢⎡a11a12⋯a1na21a22⋯a2n⋯⋯⋯⋯am1am2⋯amn⎦⎥⎥⎤
2.11.1例子1
A = [ 1 2 5 6 ] A = \left[ \begin{matrix} 1 & 2\\ 5 & 6 \end{matrix} \right] A=[1526]
A的转置矩阵为
A = [ 1 5 2 6 ] A = \left[ \begin{matrix} 1 & 5\\ 2 & 6 \end{matrix} \right] A=[1256]
2.11.2转置的运算性质
( A T ) T = A ( λ A ) T = λ A T ( A B ) T = B T A T ( A + B ) T = A T + B T (A^T)^T=A\\ (\lambda A)^T=\lambda A^T\\ (AB)^T=B^TA^T\\ (A+B)^T=A^T+B^T (AT)T=A(λA)T=λAT(AB)T=BTAT(A+B)T=AT+BT
2.12方阵行列式
- 行列式是数学的一个函数,可以看作在几何空间中,一个线性变换 对“面积”或“体积”的影响。
方阵行列式,n阶方阵A的行列式表示为|A|或者det(A)
- 1X1的方阵,其行列式等于该元素本身。 A = ( a 11 ) ∣ A ∣ = a 11 A=(a_{11}) \space \space |A| =a_{11} A=(a11) ∣A∣=a11
- 2X2的方阵,其行列式用主对角线元素乘积减去次对角线元素的乘积。
A = [ a 11 a 12 a 21 a 22 ] A = \left[ \begin{matrix} a_{11} & a_{12}\\ a_{21} & a_{22} \end{matrix} \right] A=[a11a21a12a22]
∣ A ∣ = a 11 ∗ a 22 − a 12 ∗ a 21 |A| = a_{11}*a_{22}-a_{12}*a_{21} ∣A∣=a11∗a22−a12∗a21
方阵行列式,n阶方阵A的方阵行列式表示为|A|或者det(A);n阶方阵A的行列式计算规则为:主对角线元素乘积和减去次对角线元素乘积和。设 r i r_i ri为第i个主对角线的积, l i l_i li为第i个次对角线的积。 0 ≤ i ≤ n 0≤i≤n 0≤i≤n
A = [ a 11 a 12 ⋯ a 1 n a 21 a 22 ⋯ a 2 n ⋯ ⋯ ⋯ ⋯ a m 1 a m 2 ⋯ a m n ] A = \left[ \begin{matrix} a_{11} & a_{12} &\cdots & a_{1n} \\ a_{21} & a_{22} &\cdots & a_{2n} \\ \cdots & \cdots &\cdots & \cdots \\ a_{m1} & a_{m2} &\cdots & a_{mn} \\ \end{matrix} \right] A=⎣⎢⎢⎡a11a21⋯am1a12a22⋯am2⋯⋯⋯⋯a1na2n⋯amn⎦⎥⎥⎤
r i = Π k = 1 i ( a k ( n + k − i ) ∗ Π k = i + 1 n a k ( k − 1 ) ) l i = Π k = 1 i ( a k ( n + k − i ) ∗ Π k = i + 1 n a k ( k − 1 ) ) ∣ A ∣ = Σ i = 1 n r i − Σ i = 1 n l i r_i=\Pi_{k=1}^i(a_{k(n+k-i)}*\Pi_{k=i+1}^na_{k(k-1)})\\ l_i=\Pi_{k=1}^i(a_{k(n+k-i)}*\Pi_{k=i+1}^na_{k(k-1)})\\ |A|=\Sigma_{i=1}^nr_i-\Sigma_{i=1}^nl_i ri=Πk=1i(ak(n+k−i)∗Πk=i+1nak(k−1))li=Πk=1i(ak(n+k−i)∗Πk=i+1nak(k−1))∣A∣=Σi=1nri−Σi=1nli
根据方阵行列式的计算规则可以得到三阶方阵A的行列式为:
∣ A ∣ = Σ i = 1 3 r i − Σ i = 1 3 l i = a 13 a 21 a 32 + a 12 a 23 a 31 + a 11 a 22 a 33 − a 11 a 23 a 32 − a 12 a 21 a 33 − a 13 a 22 a 31 |A|=\Sigma_{i=1}^3r_i-\Sigma_{i=1}^3l_i=a_{13}a_{21}a_{32}+a_{12}a_{23}a_{31}+a_{11}a_{22}a_{33}-a_{11}a_{23}a_{32}-a_{12}a_{21}a_{33}-a_{13}a_{22}a_{31} ∣A∣=Σi=13ri−Σi=13li=a13a21a32+a12a23a31+a11a22a33−a11a23a32−a12a21a33−a13a22a31
2.13代数余子式
在一个n阶的行列式A中,把元素 a i j ( i , j = 1 , 2 , 3 , . . . . , n ) a_{ij}(i,j=1,2,3,….,n) aij(i,j=1,2,3,….,n)所在的行和列划 去后,剩下的(n-1)2个元素按照原来的次序组成的一个n-1阶行列式 M i j M_{ij} Mij,称为元素 a i j a_{ij} aij的余子式。Mij带上符号 ( − 1 ) ( i + j ) (-1)^{(i+j)} (−1)(i+j)称为 a i j a_{ij} aij的代数余子式, 记作: A i j = ( − 1 ) ( i + j ) M i j A_{ij}=(-1)^{(i+j)}M_{ij} Aij=(−1)(i+j)Mij
2.13.1例子1
[ 3 1 4 − 1 2 − 5 1 3 0 ] = 1 ∗ [ 1 4 2 − 5 ] + 3 ∗ ( − 1 ) ∗ [ 3 4 − 1 − 5 ] = − 13 + 3 ∗ 11 = 20 \left[ \begin{matrix} 3 & 1 & 4\\ -1 & 2 & -5\\ 1 & 3 & 0 \end{matrix} \right]=1*\left[ \begin{matrix} 1 & 4\\ 2 & -5 \end{matrix} \right]+3*(-1)*\left[ \begin{matrix} 3 & 4\\ -1 & -5 \end{matrix} \right]=-13+3*11=20 ⎣⎡3−111234−50⎦⎤=1∗[124−5]+3∗(−1)∗[3−14−5]=−13+3∗11=20
2.14伴随矩阵
对于n阶方阵的任意元素 a i j a_{ij} aij都有各自的代数余子式 A i j = ( − 1 ) ( i + j ) M i j A_{ij}=(-1)^{(i+j)}M_{ij} Aij=(−1)(i+j)Mij
,将所有的代数余子式按照次序进行排列,可以得到一个n阶的方阵 A*;那么A称为矩阵A的伴随矩阵。
注意: A i j A_{ij} Aij位于A的第j行第i列
A ∗ A ∗ = ∣ A ∣ ∗ E = [ A 11 A 21 ⋯ A n 1 A 12 A 22 ⋯ A n 2 ⋯ ⋯ ⋯ ⋯ A 1 n A 2 n ⋯ A n n ] A*A^*=|A|*E=\left[ \begin{matrix} A_{11} & A_{21} &\cdots & A_{n1}\\ A_{12} &A_{22} &\cdots & A_{n2}\\ \cdots & \cdots &\cdots &\cdots\\ A_{1n} & A_{2n} &\cdots & A_{nn} \end{matrix} \right] A∗A∗=∣A∣∗E=⎣⎢⎢⎡A11A12⋯A1nA21A22⋯A2n⋯⋯⋯⋯An1An2⋯Ann⎦⎥⎥⎤
2.15方阵的逆
设A是数域上的一个n阶方阵,若在相同的数域上存在另一个n阶方阵B,使 得AB=BA=E,那么称B为A的逆矩阵,而A被称为可逆矩阵或非奇异矩阵。 如果A不存在逆矩阵,那么A称为奇异矩阵。A的逆矩阵记作: A − 1 A^{-1} A−1
具有以下性质:
- 如果矩阵A是可逆的,那么矩阵A的逆矩阵是唯一的。
- A的逆矩阵的逆矩阵还是A,记作 ( A − 1 ) − 1 = A (A^{-1})^{-1}=A (A−1)−1=A
- 可逆矩阵A的转置矩阵A也可逆,并且 ( A T ) − 1 = ( A − 1 ) T (A^T )^{-1} =(A^{-1})^T (AT)−1=(A−1)T
- 若矩阵A可逆,则矩阵A满足消去律,即AB=AC => B=C
- 矩阵A可逆的充要条件是行列式|A|不等于0
2.15.1例子1
求方阵
A = [ 1 2 3 2 2 1 3 4 3 ] A = \left[ \begin{matrix} 1 & 2 & 3\\ 2 & 2 & 1\\ 3 & 4 & 3\\ \end{matrix} \right] A=⎣⎡123224313⎦⎤
的逆矩阵
解:
∵ ∣ A ∣ = ∣ 1 2 3 2 2 1 3 4 3 ∣ = 1 ∗ 2 ∗ 3 + 2 ∗ 1 ∗ 3 + 3 ∗ 2 ∗ 4 − 3 ∗ 2 ∗ 3 − 1 ∗ 4 ∗ 1 − 3 ∗ 2 ∗ 2 = 2 ≠ 0 , ∴ A − 1 存 在 。 A 11 = ∣ 2 1 4 3 ∣ = 2 , A 12 = − ∣ 2 1 3 3 ∣ = − 3 , 同 理 可 得 A 13 = 2 , A 21 = 6 , A 22 = − 6 , A 23 = 2 , A 31 = − 4 , A 32 = 5 , A 33 = − 2 , 得 A ∗ = ∣ 2 6 − 4 − 3 − 6 5 2 2 − 2 ∣ , 故 A − 1 = 1 ∣ A ∣ A ∗ = 1 2 [ 2 6 − 4 − 3 − 6 5 2 2 − 2 ] = ∣ 1 3 − 2 − 3 / 2 − 3 5 / 2 1 1 − 1 ∣ \because |A| = \left| \begin{matrix} 1 & 2 & 3\\ 2 & 2 & 1\\ 3 & 4 & 3\\ \end{matrix} \right|=1*2*3+2*1*3+3*2*4-3*2*3-1*4*1-3*2*2=2\neq0,\\ \therefore A^{-1}存在。\\ A_{11}=\left| \begin{matrix} 2 & 1\\4 & 3 \end{matrix} \right|=2,\\ A_{12}=-\left| \begin{matrix} 2 & 1\\3 & 3 \end{matrix} \right|=-3,\\ 同理可得 A_{13}=2,A_{21}=6,A_{22}=-6,A_{23}=2,A_{31}=-4,A_{32}=5,A_{33}=-2,\\ 得A^*=\left| \begin{matrix} 2 & 6 & -4\\-3 & -6 & 5\\2 & 2& -2 \end{matrix} \right|,\\ 故A^{-1}=\frac{1}{|A|}A^*=\frac{1}{2}\left[ \begin{matrix} 2 & 6 & -4\\-3 & -6 & 5\\2 & 2& -2 \end{matrix} \right]=\left| \begin{matrix} 1 & 3 & -2\\-3/2 & -3 & 5/2\\1 & 1& -1 \end{matrix} \right| ∵∣A∣=∣∣∣∣∣∣123224313∣∣∣∣∣∣=1∗2∗3+2∗1∗3+3∗2∗4−3∗2∗3−1∗4∗1−3∗2∗2=2=0,∴A−1存在。A11=∣∣∣∣2413∣∣∣∣=2,A12=−∣∣∣∣2313∣∣∣∣=−3,同理可得A13=2,A21=6,A22=−6,A23=2,A31=−4,A32=5,A33=−2,得A∗=∣∣∣∣∣∣2−326−62−45−2∣∣∣∣∣∣,故A−1=∣A∣1A∗=21⎣⎡2−326−62−45−2⎦⎤=∣∣∣∣∣∣1−3/213−31−25/2−1∣∣∣∣∣∣
3矩阵的初等变换
下面三种变换称为矩阵的初等行变换:
- 对调两行(对调 i, j两行,记作 r i ↔ r j r_i\leftrightarrow r_j ri↔rj )
- 以数 k ≠ 0 k \neq 0 k=0 乘以某一行的所有元素;(第 i 行乘 k,记作 r i ∗ k r_i * k ri∗k)
- 把某一行所有元素的 k 倍加到另一行对应的元素上去(第 j 行的 k 倍加到第 i 行上记作 r i + k r j r_i+ kr_j ri+krj ).
定义:
矩阵的初等列变换与初等行变换统称为初等变换.
如果矩阵 A 经有限次初等变换变成 矩阵 B, 就称矩阵 A 与 B 等价,记作 A ~ B.
3.1等价关系的性质
(1) 自反性:A ~ A
(2) 对称性:若A ~ B,则B ~ A
(3) 传递性:若A ~ B,且B ~ C,则A ~ C
3.2等价标准形定理
用初等变换必能将任何一个矩阵化为如下等价标准形:
[ E r O O O ] \left[ \begin{matrix}E_r & O\\ O & O\end{matrix} \right] [ErOOO]
等价标准形是唯一的。
设A与B为 m * n 矩阵,那么:
3.2.1例子1
设
A = [ 2 − 1 − 1 1 1 − 2 4 − 6 2 ] A= \left[ \begin{matrix}2 & -1 & -1\\ 1 & 1 & -2 \\ 4 & -6 &2\end{matrix} \right] A=⎣⎡214−11−6−1−22⎦⎤
的行最简形矩阵F,求可逆矩阵P使得PA=F
解:
( A , E ) = [ 2 − 1 − 1 1 0 0 1 1 − 2 0 1 0 4 − 6 2 0 0 1 ] (A,E)= \left[ \begin{matrix} 2 & -1 & -1 & 1 & 0 & 0\\ 1 & 1 & -2 & 0 & 1 & 0 \\ 4 & -6 & 2 & 0 & 0 & 1\\ \end{matrix} \right] (A,E)=⎣⎡214−11−6−1−22100010001⎦⎤
( A , E ) = [ 2 − 1 − 1 1 0 0 1 1 − 2 0 1 0 4 − 6 2 0 0 1 ] r 1 ↔ r 2 r 3 − 2 r 2 r 2 − 2 r 1 = [ 1 1 − 2 0 1 0 0 − 3 − 3 1 − 2 0 0 − 4 4 − 2 0 1 ] r 2 − r 3 r 1 − r 2 r 3 + 4 r 2 = [ 1 0 − 1 − 3 3 1 0 1 − 1 3 − 2 − 1 0 0 0 10 − 8 − 3 ] (A,E)=\begin{array}{lc} \left[\begin{array}{cc} 2 & -1 & -1 & 1 & 0 & 0\\ 1 & 1 & -2 & 0 & 1 & 0 \\ 4 & -6 & 2 & 0 & 0 & 1\\ \end{array}\right]&\begin{array}{c}r_1\leftrightarrow r_2\\r_3-2r_2\\r_2-2r_1\end{array} \end{array}=\\ \begin{array}{lc} \left[\begin{array}{cc} 1 & 1 & -2 & 0 & 1 & 0 \\ 0 & -3 & -3 & 1 & -2 & 0\\ 0 & -4 & 4 & -2 & 0 & 1\\ \end{array}\right]&\begin{array}{c}r_2-r_3\\r_1-r_2\\r_3+4r_2\end{array} \end{array}=\\ \begin{array}{lc} \left[\begin{array}{cc} 1 & 0 & -1 & -3 & 3 & 1 \\ 0 & 1 & -1 & 3 & -2 & -1\\ 0 & 0 & 0 & 10 & -8 & -3\\ \end{array}\right] \end{array} (A,E)=⎣⎡214−11−6−1−22100010001⎦⎤r1↔r2r3−2r2r2−2r1=⎣⎡1001−3−4−2−3401−21−20001⎦⎤r2−r3r1−r2r3+4r2=⎣⎡100010−1−10−33103−2−81−1−3⎦⎤
F = [ 1 0 − 1 0 1 − 1 0 0 0 ] , P = [ − 3 3 1 3 − 2 − 1 10 − 8 − 3 ] F=\left[ \begin{matrix} 1 & 0 & -1\\ 0 & 1 & -1\\ 0 & 0 & 0 \end{matrix} \right], \\ P = \left[ \begin{matrix} -3 & 3 & 1\\ 3 & -2 & -1\\ 10 & -8 & -3 \end{matrix} \right] F=⎣⎡100010−1−10⎦⎤,P=⎣⎡−33103−2−81−1−3⎦⎤
使 P A = F PA=F PA=F
3.2.2例子2
设
A = [ 0 − 2 1 3 0 − 2 − 2 3 0 ] A= \left[ \begin{matrix} 0 & -2 & 1\\ 3 & 0 & -2\\ -2 & 3 & 0 \end{matrix} \right] A=⎣⎡03−2−2031−20⎦⎤
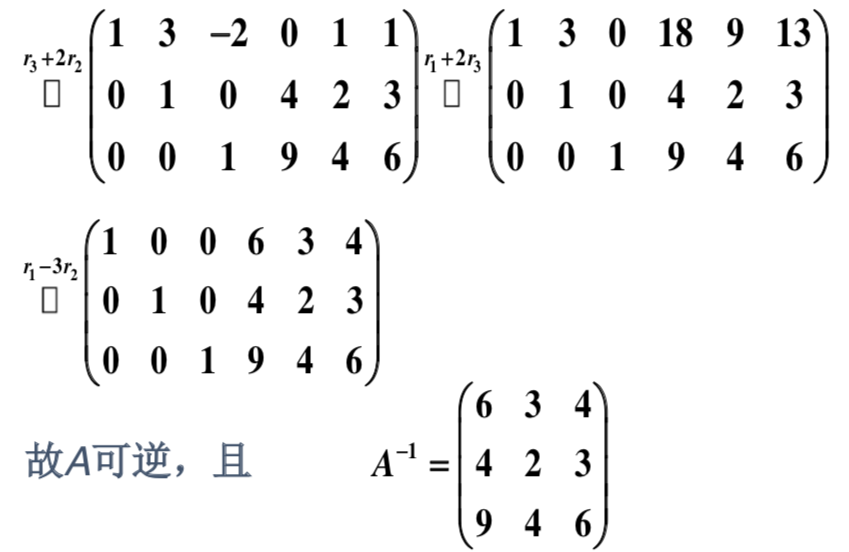
证明A可逆,求 A − 1 A^{-1} A−1
解:
对(A,E)做初等行变换化为(F,P),F为A的行最简行,如果F=E则A可逆,且 P = A − 1 P=A^{-1} P=A−1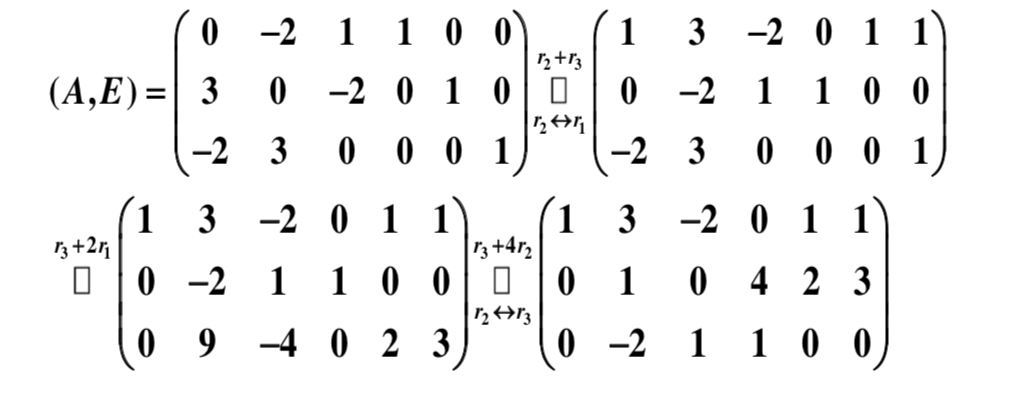
3.3矩阵的秩
在m*n矩阵A中,任取k行k列,不改变这 k 2 k^2 k2个元素的在A中的次序,得到k 阶方阵,称为矩阵A的k阶子式。
- m ∗ n m*n m∗n阶矩阵A的k阶子式有 C m k C n k C_m^kC_n^k CmkCnk个
设在矩阵A中有一个不等于0的r阶子式D,且所有r+1阶子式(如果存在)全 等于0,那么D称为矩阵A的最高阶非零子式,r称为矩阵A的秩,记作 R(A)=r - n*n的可逆矩阵,秩为n
- 可逆矩阵又称为满秩矩阵
- 矩阵的秩等于它行(列)向量组的秩
3.3.1例子
求矩阵
B = [ 2 − 1 0 3 − 2 0 3 1 − 2 5 0 0 0 4 − 3 0 0 0 0 0 ] B= \left[ \begin{matrix} 2 & -1 & 0 & 3 & -2\\ 0 & 3 & 1 &-2 & 5\\ 0 & 0 & 0& 4 & -3\\ 0 & 0& 0& 0&0 \end{matrix} \right] B=⎣⎢⎢⎡2000−130001003−240−25−30⎦⎥⎥⎤
的秩。
解:
∵ B 是 一 个 行 阶 梯 形 矩 阵 , 其 非 零 行 有 3 行 ∴ B 的 所 有 4 阶 子 式 全 部 为 0 \because B是一个行阶梯形矩阵,其非零行有3行\\ \therefore B的所有4阶子式全部为0\\ ∵B是一个行阶梯形矩阵,其非零行有3行∴B的所有4阶子式全部为0
而
∣ 2 − 1 3 0 3 − 2 0 0 4 ∣ ≠ 0 ∴ R ( B ) = 3 \left| \begin{matrix} 2 & -1 & 3\\ 0 & 3 &-2\\ 0 & 0& 4 \end{matrix} \right| \neq 0 \therefore R(B)=3 ∣∣∣∣∣∣200−1303−24∣∣∣∣∣∣=0∴R(B)=3
3.4向量组
向量组:有限个相同维数的行向量或列向量组合成的一个集合就叫做向量组
A = ( a ⃗ 1 , a ⃗ 2 , . . . . a ⃗ n . . . . . ) A = (\vec a_1,\vec a_2,….\vec a_n…..) A=(a1,a2,….an…..)
向量组是有多个向量构成,可以表示为矩阵
3.4.1向量组等价
- 向量b能由向量组 A : a 1 , a 2 , . . . a m A:a_1,a_2,…a_m A:a1,a2,…am线性表示的充要条件为矩阵 A = ( a 1 , a 2 , . . . a m ) A=(a_1,a_2,…a_m) A=(a1,a2,…am)的秩等于矩阵 B = ( a 1 , a 2 , . . . a m , b ) B=(a_1,a_2,…a_m,b) B=(a1,a2,…am,b)的秩。
- 设有两个向量组A:a1,a2,…am及B:b1,b2,…bm,若B组的向量都能由 向量组A线性表示,则称向量组B能由向量组A线性表示。若向量组 A和向量组B能相互线性表示,则称两个向量组等价。
3.4.2系数矩阵
将向量组A和B所构成的矩阵依次记作 A = ( a 1 , a 2 , . . . a m ) A=(a_1,a_2,…a_m) A=(a1,a2,…am)和 B = ( b 1 , b 2 , . . . b n ) B=(b_1,b_2,…b_n) B=(b1,b2,…bn),且组B能由向量组A线性表示。即对每个向量 b j b_j bj,存
在 k 1 j , k 2 j , . . . , k m j k_{1j} ,k_{2j} ,…,k_{mj} k1j,k2j,…,kmj ;使得
b j = k 1 j a 1 + k 2 j a 2 + . . . . + k m j a m = ( a 1 a 2 . . . . . a m ) [ k 1 j k 2 j ⋯ k m j ] b_j= k_{1j}a_1+k_{2j}a2+….+k_{mj}a_m=(a1\space a2\space ….. a_m)\left[ \begin{matrix} k_{1j}\\k_{2j}\\ \cdots\\k_{mj} \end{matrix} \right] bj=k1ja1+k2ja2+….+kmjam=(a1 a2 …..am)⎣⎢⎢⎡k1jk2j⋯kmj⎦⎥⎥⎤
3.4.3正交矩阵
若n阶方阵A满足 A T A = E A^T A=E ATA=E,则称A为正交矩阵,简称正交阵
- A是正交阵的充要条件:A的列(行)向量都是单位向量,且两两正交。
若A为正交矩阵,x为向量,则Ax称为正交变换。
- 正交变换不改变向量的长度。
正交矩阵的性质:
- 若A为正交矩阵,则逆矩阵 A − 1 A^{-1} A−1也为正交矩阵
- 若P、Q为正交矩阵,那么P*Q也为正交矩阵
3.4.4对称矩阵
元素以对角线为对称轴对应相等的矩阵就叫做对称矩阵
对称矩阵具有的特性:
- 对称矩阵中 a i j a_{ij} aij等于 a j i a_{ji} aji
- 对称矩阵一定是方阵;并且对于任何的方阵A, A + A T A+A^T A+AT是对称矩阵
- 除对角线外的其它元素均为0的矩阵叫做对角矩阵
- 矩阵中的每个元素都是实数的对称矩阵叫做实对称矩阵
4线性方程组
n元线性方程组 A x = b Ax=b Ax=b
- 无解的充分必要条件是 R ( A ) < R ( A , b ) R(A)<R(A,b) R(A)<R(A,b)
- 有唯一解的充分必要条件是 R ( A ) = R ( A , b ) = n R(A) = R(A,b)=n R(A)=R(A,b)=n
- 有无穷多解的充分必要条件是 R ( A ) = R ( A , b ) < b R(A)=R(A,b)<b R(A)=R(A,b)<b
4.1求解线性方程组步骤
- 对于非齐次线性方程组,把它的增广矩阵B化为行阶梯型,从中可以看出R(A)和R(B)。若R(A)<R(B),则方程无解。
- 若R(A) =R(B),则进一步把B化成行最简形。而对于齐次线性方程组,则把系数矩阵A化成最简形。
- 设R(A)=R(B)=r,把最简形中的r个非零行的非零售元所对应的未知量取作非自由未知量,其余n-r个未知量取做自由未知量,并令其未知量分别等于 c 1 , c 2 , . . . c n − r c_1,c_2,…c_{n-r} c1,c2,…cn−r,由 B(或A)的行最简形,即可写出含n-r个参数的通解。
4.1.2例子1
求解齐次线性方程组
f ( x ) = { x 1 + 2 x 2 + 2 x 3 + x 4 = 0 2 x 1 + x 2 − 2 x 3 − 2 x 4 = 0 x 1 − x 2 − 4 x 3 − 3 x 4 = 0 f(x)= \begin{cases} x_1+2x_2+2x_3+x_4=0\\ 2x_1+x_2-2x_3-2x_4=0\\ x_1-x_2-4x_3-3x_4=0 \end{cases} f(x)=⎩⎪⎨⎪⎧x1+2x2+2x3+x4=02x1+x2−2x3−2x4=0x1−x2−4x3−3x4=0
4.1.3例子2
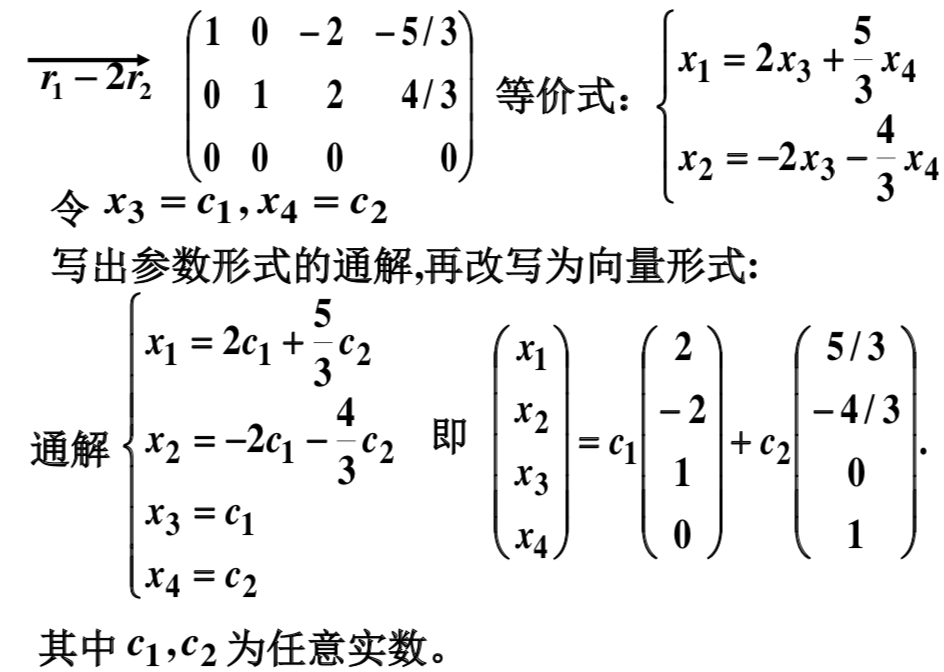
求解非齐次线性方程组
f ( x ) = { x 1 + 2 x 2 + 3 x 3 − x 4 = 1 3 x 1 + x 2 + 5 x 3 − 3 x 4 = 2 2 x 1 + x 2 + 2 x 3 − 3 x 4 = 3 f(x)= \begin{cases} x_1+2x_2+3x_3-x_4=1\\ 3x_1+x_2+5x_3-3x_4=2\\ 2x_1+x_2+2x_3-3x_4=3 \end{cases} f(x)=⎩⎪⎨⎪⎧x1+2x2+3x3−x4=13x1+x2+5x3−3x4=22x1+x2+2x3−3x4=3
解:对增广矩阵只用行变换化阶梯形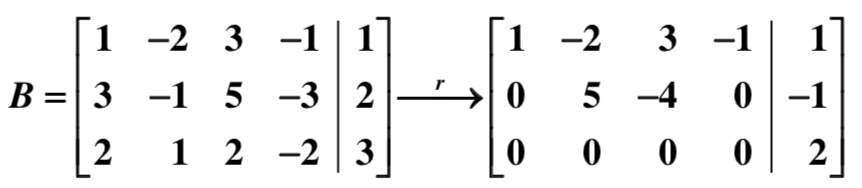
最后一行对应的方程是:0 = 2 ,所以无解。
4.2两大基本定理
n元齐次线性方程组 A X = 0 AX=0 AX=0有非零解的充分必要条件是 R ( A ) < n R(A)<n R(A)<n
- 当m<n时,齐次线性方程组 A m ∗ n x = 0 A_{m*n}x=0 Am∗nx=0一定有非零解
- 线性方程组 A X = 0 AX=0 AX=0有解的充要条件是 R ( A ) = R ( A , b ) R(A)=R(A,b) R(A)=R(A,b)
- 矩阵方程 A X AX AX有解的充要条件是 R ( A ) = R ( A , B ) R(A)=R(A,B) R(A)=R(A,B)
4.3齐次方程组解的结构定理
齐次线性方程组的解集的最大无关组称为该齐 次线性方程组的基础解系.由上面的讨论可知,要求 齐次线性方程组的通解,只需求出它的基础解系.为 此,我们可用初等变换的方法来求齐次线性方程组 的基础解系.
齐次方程组 A m ∗ n X = 0 A_{m*n}X = 0 Am∗nX=0 的基础解系所含向量个数为 n − r ( r = R ( A ) ) n-r(r=R(A)) n−r(r=R(A))
4.3.1例子1
求
f ( x ) = { x 1 + x 2 − x 3 − x 4 = 0 2 x 1 − 5 x 2 + 3 x 3 + 2 x 4 = 0 7 x 1 − 7 x 2 + 3 x 3 + x 4 = 0 f(x)= \begin{cases} x_1+x_2-x_3-x_4=0\\ 2x_1-5x_2+3x_3+2x_4=0\\ 7x_1-7x_2+3x_3+x_4=0 \end{cases} f(x)=⎩⎪⎨⎪⎧x1+x2−x3−x4=02x1−5x2+3x3+2x4=07x1−7x2+3x3+x4=0
的基础解系和通解。
解: 对系数矩阵A作初等行变换,变为行最简形矩阵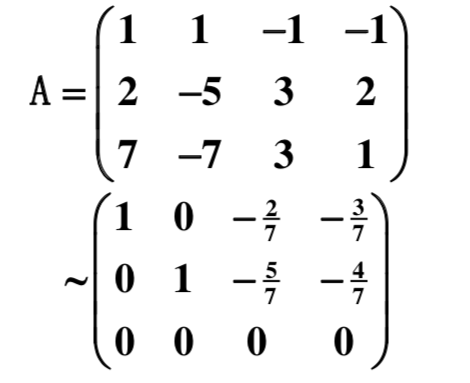

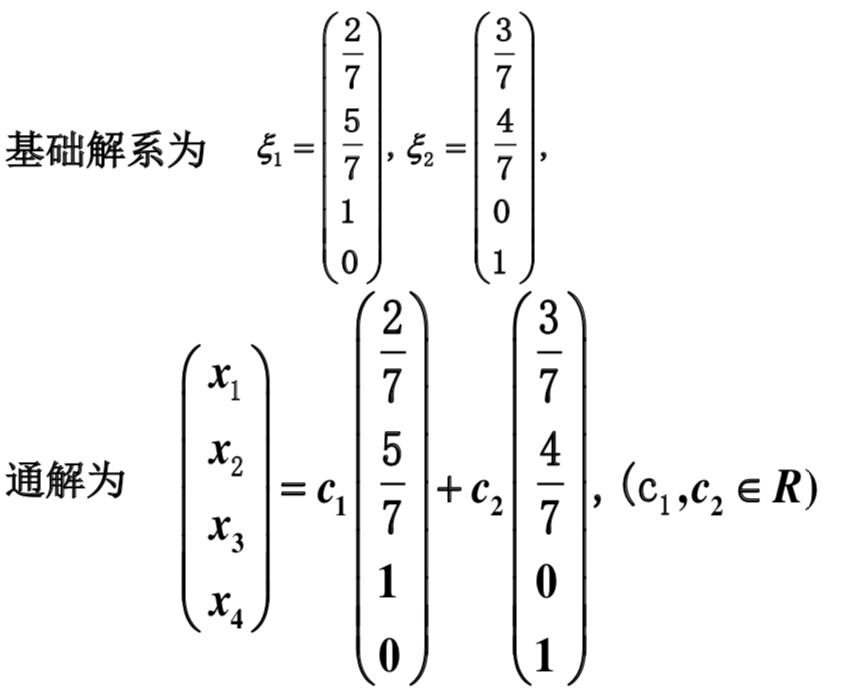
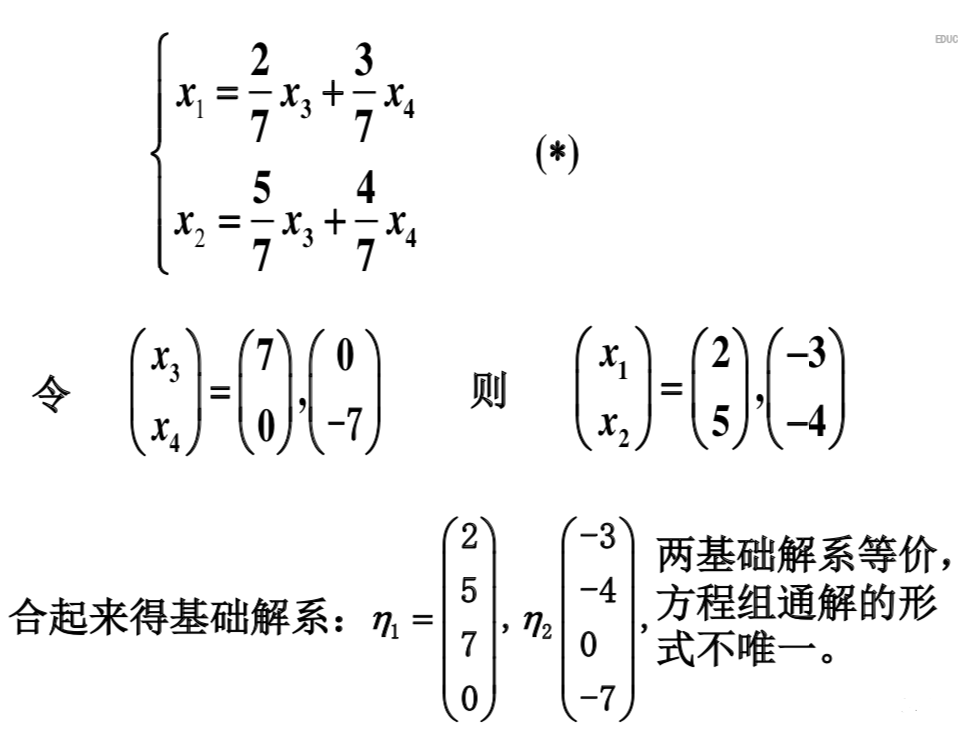
注:由最大无关组的性质可知方程组(1)的任何 n − r n - r n−r个线性无关的 解都可构成它的基础解系.从而齐次线性方程组的基础解系不唯一, 通解形式也不唯一.当 r = n r=n r=n时,只有零解没有基础解系, s = { 0 } s=\{0\} s={ 0}
5特征值和特征向量
A为n阶矩阵,若数λ和n维非0列向量x满足Ax=λx,那么数λ称为A 的特征值,x称为A的对应于特征值λ的特征向量。并且|λE-A|叫做A 的特征多项式。当特征多项式等于0的时候,称为A的特征方程,特征方程是一个齐次线性方程组,求解特征值的过程其实就是求解特征方程的解。
5.1特征值和特征向量求解
求
A = [ 3 − 1 − 1 3 ] A = \left[ \begin{matrix} 3 & -1\\ -1 & 3 \end{matrix} \right] A=[3−1−13]
的特征值和特征向量。
解:
A的特征多项式为
∣ A − λ E ∣ = ∣ 3 − λ − 1 − 1 3 − λ ∣ = ( 3 − λ 2 ) − 1 = 8 − 6 λ + λ 2 = ( 4 − λ ) ( 2 − λ ) |A-\lambda E| = \left| \begin{matrix} 3-\lambda & -1\\ -1 & 3-\lambda \end{matrix} \right|=(3-\lambda^2)-1 = 8 -6\lambda+\lambda^2=\\(4-\lambda)(2-\lambda) ∣A−λE∣=∣∣∣∣3−λ−1−13−λ∣∣∣∣=(3−λ2)−1=8−6λ+λ2=(4−λ)(2−λ)
令 ∣ A − λ E ∣ = 0 得 A 的 特 征 值 为 λ 1 = 2 , λ 2 = 4 |A-\lambda E|=0得A的特征值为\lambda_1=2,\lambda_2=4 ∣A−λE∣=0得A的特征值为λ1=2,λ2=4
6可对角化矩阵
如果一个n阶方阵A相似于对角矩阵,也就是,如果存在一个可逆 矩阵P使得 P − 1 A P P^{-1}AP P−1AP是对角矩阵,则称矩阵A为可对角化矩阵。并且最 终对角矩阵的特征值就是矩阵A的特征值。
P − 1 A P = Λ P^{-1}AP=\Lambda P−1AP=Λ
矩阵对角化在PCA、白化等机器学习领域应用的比较多。于是对于矩阵是否可以对角化,判断如下:
- 由 ∣ A − λ E ∣ = 0 ⇒ |A-\lambda E|=0\Rightarrow ∣A−λE∣=0⇒求出所有的特征值 λ i \lambda_i λi
- 如果所有的特征值都是单根,则A一定能对角化
- 如果A的特征值有重根,则对每个 λ i \lambda_i λi,求齐次方程组 ( A − λ i E ) X = 0 (A-\lambda_iE)X=0 (A−λiE)X=0的基础解析系,如果基础解系所含向量的个数等于 λ i \lambda_i λi的重根数或等于 n − R ( A − λ i E ) n-R(A-\lambda_iE) n−R(A−λiE),则A可以对角化且这些 基 础解系排成的矩阵为相似变换矩阵
6.1例子1
设
A = [ 4 6 0 − 3 − 5 0 − 3 − 6 1 ] A=\left[ \begin{matrix} 4 & 6 & 0\\ -3 & -5 & 0\\ -3 & -6 & 1 \end{matrix} \right] A=⎣⎡4−3−36−5−6001⎦⎤
A能否对角化?若能对角化,则求出可逆矩阵P, 使 P − 1 A P P^{-1}AP P−1AP为对角阵.
解:
∣ A − λ E ∣ = [ 4 − λ 6 0 − 3 − 5 − λ 0 − 3 − 6 1 − λ ] = − ( λ − 1 ) 2 ( λ + 2 ) |A-\lambda E|=\left[ \begin{matrix} 4-\lambda & 6 & 0\\ -3 & -5-\lambda & 0\\ -3 & -6 & 1-\lambda \end{matrix} \right]=-(\lambda-1)^2(\lambda+2) ∣A−λE∣=⎣⎡4−λ−3−36−5−λ−6001−λ⎦⎤=−(λ−1)2(λ+2)
所以A的全部特征值为 λ 1 = λ 2 = 1 , λ 3 = − 2 \lambda_1=\lambda_2=1,\lambda_3=-2 λ1=λ2=1,λ3=−2
将 λ 1 = λ 2 = 1 \lambda_1 =\lambda_2 =1 λ1=λ2=1代入 ( A − λ E ) x = 0 (A-\lambda E)x=0 (A−λE)x=0得方程组
解之得基础解系:
ζ 1 = ( − 2 1 0 ) , ζ 2 = ( 0 0 1 ) , \zeta_1=\left( \begin{matrix} -2 \\ 1 \\0\end{matrix}\right),\\ \zeta_2=\left( \begin{matrix} 0 \\ 0 \\1\end{matrix}\right),\\ ζ1=⎝⎛−210⎠⎞,ζ2=⎝⎛001⎠⎞,
将 λ 3 = 2 \lambda_3=2 λ3=2代入 ( A − λ E ) x = 0 (A-\lambda E)x=0 (A−λE)x=0得方程组的基础
解系:
ζ 3 = ( − 1 , 1 , 1 ) T \zeta_3 =(-1,1,1)^T ζ3=(−1,1,1)T
由于 ζ 1 , ζ 2 , ζ 3 \zeta_1,\zeta_2,\zeta_3 ζ1,ζ2,ζ3 线性无关. 所以 A 可对角化.
令
P = ( ζ 1 , ζ 2 , ζ 3 ) = [ − 2 0 − 1 1 0 1 0 1 1 ] P=(\zeta_1,\zeta_2,\zeta_3)=\left[\begin{matrix}-2 & 0 &-1\\1&0&1\\0&1&1\end{matrix}\right] P=(ζ1,ζ2,ζ3)=⎣⎡−210001−111⎦⎤
则有
P − 1 A P = [ 1 0 0 0 1 0 0 0 − 2 ] P^{-1}AP=\left[\begin{matrix}1 & 0&0\\0&1&0\\0&0&-2\end{matrix}\right] P−1AP=⎣⎡10001000−2⎦⎤
即矩阵 P 的列向量和对角矩阵中特征值的位置 要相互对应.
7正定矩阵
- 对于n阶方阵A,若任意n阶向量x,都有 x T A x > 0 x^T Ax>0 xTAx>0,则称矩阵A为正
定矩阵。 - 若 x T A x > = 0 x^T Ax>=0 xTAx>=0,则矩阵A为半正定矩阵。
8奇异矩阵
- 若方阵A的行列式的值等于0,那么方阵A叫做奇异矩阵,否则叫做 非奇异矩阵。
- 可逆矩阵就是非奇异矩阵,非奇异矩阵也是可逆矩阵。
- 若A为奇异矩阵,则Ax=0有无穷解,Ax=b有无穷解或者无解。
- 若A为非奇异矩阵,则Ax=0有且只有唯一零解,Ax=b有唯一解。
9QR分解
- 对于m*n的列满秩矩阵A,必有: A m ∗ n = Q m ∗ n ∗ R m ∗ n A_{m*n}=Q_{m*n}*R_{m*n} Am∗n=Qm∗n∗Rm∗n
- 其中Q为正交矩阵,R为非奇异上三角矩阵,当要求R的对角线元素 为正的时候,该分解唯一。
- 该分解叫做QR分解,常用于求解A的特征值、A的逆等问题。
- QR分解是将矩阵分解为一个正交矩阵与上三角矩阵的乘积
- 这其中,Q为正交矩阵, Q T Q = I Q^TQ=I QTQ=I,R为上三角矩阵
- 实际中,QR分解被用来解线性最小二乘问题
10SVD
- 奇异值分解(Singular Value Decomposition)是一种重要的矩阵分 解方法,可以看做是对称方阵在任意矩阵上的推广。
假设A为一个m*n阶实矩阵,则存在一个分解使得:
A m ∗ n = U m ∗ m ∑ m ∗ n V n ∗ n T A_{m*n}=U_{m*m}\sum_{m*n}V_{n*n}^T Am∗n=Um∗m∑m∗nVn∗nT- 通常将奇异值由大到小排列,这样Σ便能由A唯一确定了.
与特征值、特征向量的概念相对应,则:
- Σ对角线上的元素称为矩阵A的奇异值
- U和V称为A的左/右奇异向量矩阵


























")

")
")




还没有评论,来说两句吧...